Демонстрационные программы ROBOTIS STEM Level 1 (Standard Kit)
Инструкции по сборке моделей роботов из образовательного робототехнического набора ROBOTIS STEM Level 1 (Standard Kit) представлены в графической среде R+ Design, которую вы можете бесплатно скачать в разделе «Программное обеспечение ROBOTIS» на соответствующей странице сайта.
| Робот
|
Описание
|
1. Sequence Racer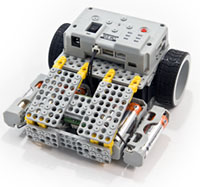 |
Скачать Начальный этап Алгоритм: Управляйте направлением движения робота с помощью кнопок контроллера. |
2. Bug Fighter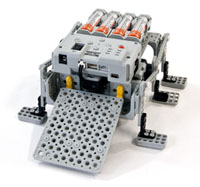 |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12W ID[1, 2]: режим колеса. Алгоритм: Робот следует за черной линией. |
3. Tumbler |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12W ID[1, 2]: режим колеса. Алгоритм: ИК-датчики обнаруживают препятствия и определяют направление движения робота. |
4. Line Follower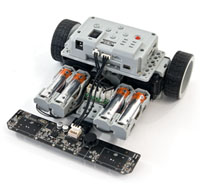 |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12W ID[1, 2]: режим колеса. Алгоритм: робот перемещается по маршрутной сетке, построенной из черных линий. |
5. Digital Piano |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12W ID[1, 2]: режим колеса. Алгоритм: на основе показания ИК-датчика робот проигрывает определенную музыку. |
6. Motorcycle |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12W ID[1]: режим колеса, AX-12W ID[2]: режим шарнира. Алгоритм: отслеживание черной линии и определение препятствий. |
7. Avoider |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12W ID[1, 2]: режим колеса. Алгоритм: сохраняет заданное расстояние от находящегося справа объекта. |
Демонстрационные программы ROBOTIS STEM Level 2 (Expansion Kit)
Инструкции по сборке моделей роботов из образовательного робототехнического набора ROBOTIS STEM Level 2 (Expansion Kit) представлены в графической среде R+ Design, которую вы можете бесплатно скачать в разделе «Программное обеспечение ROBOTIS» на соответствующей странице сайта.
| Робот | Описание |
8. Scribbler |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12W ID[1]: режим колеса, AX-12A ID[3,4]: режим колеса. Алгоритм: робот выполняет последовательно введенные команды. |
9. Transporter |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12W ID[1, 2]: режим колеса; AX-12A ID[3 ~ 5]: режим шарнира. Алгоритм: робот следует по заранее определенному пути и завершает миссию.. |
10. Probe Car |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12W ID[1, 2]: режим колеса; AX-12A ID[3, 4]: режим шарнира. Алгоритм: если робот во время движения определяет объект, он перемещает его. |
11. Beetle Gripper |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12W ID[1, 2]: режим колеса; AX-12A ID[3 ~ 5]: режим шарнира. Алгоритм: дистанционное управление роботом при помощи пульта дистанционного управления (работает по ИК-каналу). |
12. Robot Arm |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12A ID[3 ~ 6]: режим шарнира. Алгоритм: при помощи ИК-датчика определяет чашку и переносит ее в определенную зону. |
13. Walking Droid |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Скачать Файл сложных движений Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12A ID[3 ~ 6]: режим шарнира. Алгоритм: робот при помощи ИК-датчиков обнаруживает и избегает препятствия. |
14. Hexapod |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Скачать Файл сложных движений Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12A ID[3 ~ 5]: режим шарнира. Алгоритм: робот при помощи ИК-датчиков обнаруживает и избегает препятствия. |
15. Greeting Penguin |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Скачать Файл сложных движений Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12W ID[1, 2]: режим колеса; AX-12A ID[3 ~ 6]: режим шарнира. Алгоритм: робот запоминает последовательность введенных команд и выполняет ее в том же порядке. |
16. Cannon Shooter |
Скачать Начальный этап Скачать Этап разработки Скачать Этап применения Посмотреть видеодемонстрацию Настройки DYNAMIXEL: AX-12W ID[1, 2]: режим колеса; AX-12A ID[3 ~ 6]: режим шарнира. Алгоритм: робот-пушка с дистанционным управлением при помощи команд с пульта. |