Название программного обеспечения
Система управления манипуляционными РТК MotionCore.
Краткое описание
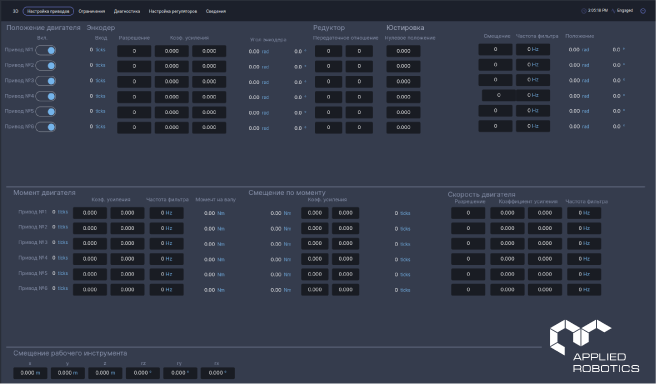
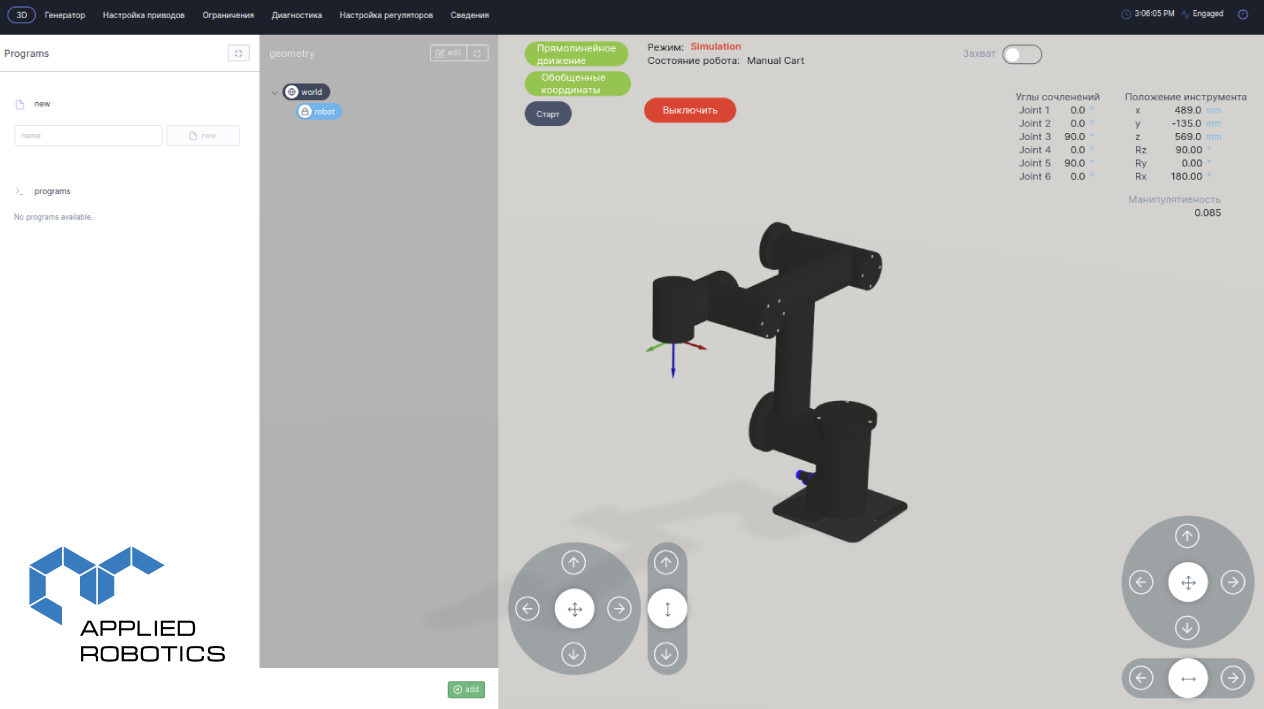
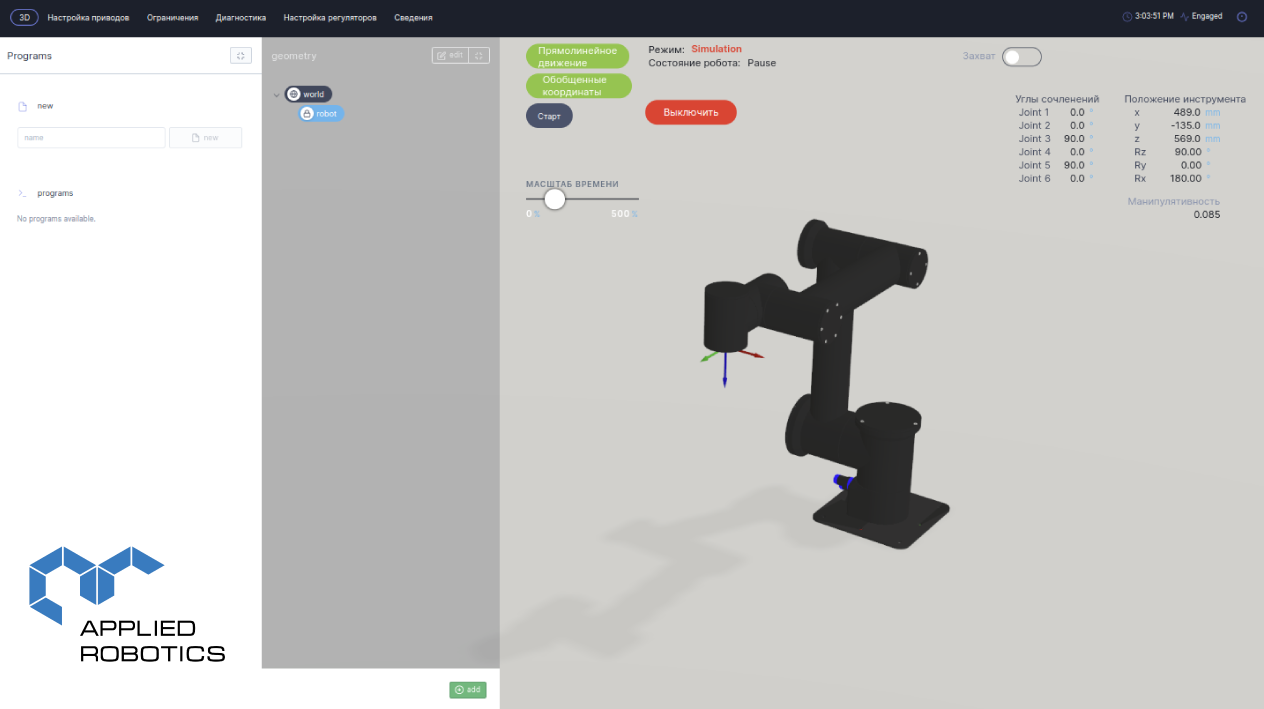
«MotionCore» – специализированное программное обеспечение (ПО) для управления манипуляционными робототехническими комплексами (РТК). Основной функцией данного ПО является генерация и отправление управляющих воздействий на робототехнические устройства, а также обработка сигналов, поступающих с датчиков и различных устройств промышленного назначения. Взаимодействие с робототехническими устройствами, а также другими электромеханическими системами (сервоприводами, датчиками) осуществляется на базе стандартов промышленной сети Ethercat и CAN.
Основными пользователями системы управления MotionCore являются производители и интеграторы робототехнических устройств. ПО позволяет быстро и эффективно выполнить конфигурацию робототехнических приложений, предоставляя готовые реализации конечных автоматов, кинематических и динамических моделей многозвенных механизмов, контроллеров управления движением, модулей для обработки ошибок и взаимодействия с аппаратным обеспечением. Пользователь может взаимодействовать с ПО при помощи API Python, C++.
Общие финансовые условия использования
Система управления манипуляционными РТК MotionCore распространяется посредством пользовательских лицензий, каждая из которых может использоваться только для одного манипуляционного робототехнического комплекса.
Документация к системе управления
Документация, содержащая информацию, необходимую для эксплуатации экземпляра программного обеспечения, предоставленного для проведения экспертной проверки: Ссылка