Манипуляционные РТК коллаборативного типа
Манипуляционный робототехнический комплекс AR-IRC-M10 с комплектом управляющего ПО
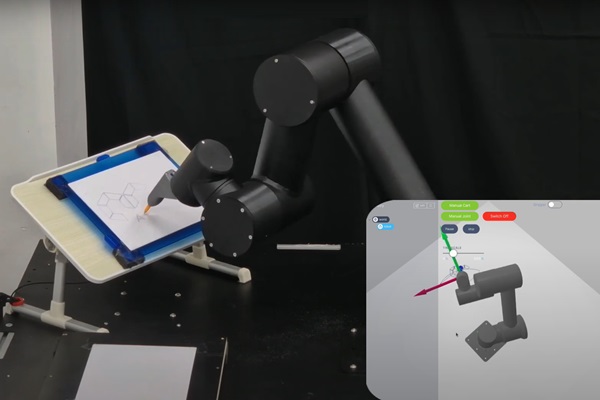


Робототехнический комплекс представляет собой 6-ти степенной манипуляционный механизм с угловой кинематикой, оснащенный модульными сервоприводами и управляемый с помощью отечественного котроллера и встроенного программного-обеспечения.
Представленный в данном робототехническом комплексе манипуляционный РТК построен на базе интеллектуальных сервоприводов, представляющих собой объединенные привод, редуктор и систему управления, объединенные друг с другом посредством шины Ethercat.
В состав комплекта входит программное обеспечение для программирования в визуальной среде, а также с помощью скриптов на языке Python и для разработки систем управления на основе ROS. Входящая в состав программного обеспечения виртуальная модель манипулятора, позволяет осуществлять оффлайн программирование и моделирование совместной работы с системами технического зрения, периферийным оборудованием, рабочими органами и оснасткой, что обеспечивает быстрый ввод в эксплуатацию и интеграцию РТК в технологические процессы.
Радиус рабочей зоны: 850 мм
Грузоподъемность: 15 кг
Точность позиционирования: 0,1 мм
Повторяемость: 0,005 мм
Страна происхождения: Российская федерация
Изготовитель: ООО «Прикладная робототехника»
Образовательный модульный манипулятор

Учебная ячейка на базе образовательного модульного манипулятора , оснащенного системой технического зрения и программируемым контроллером для разработки практико-ориентированных задач. Манипулятор предназначен для автономного выполнения операций типа «pick&place» ,осуществляя автономное распознавание положения объектов в рабочей зоне, захват объекта, перемещение объектов и позиционирование их в рабочей зоне.
В состав ячейки входит специализированная система технического зрения, которая предназначена для обнаружения объектов, автоматической локализации объектов и манипулятора относительно графических маркеров, расположенных в рабочей зоне.