Демонстрационные программы и инструкции по сборке ROBOTIS Premium
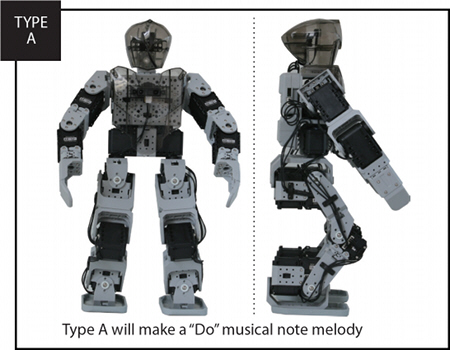
Из образовательного робототехнического набора ROBOTIS Premium учащимся предлагается собрать 27 типовых моделей роботов. Основной демонстрационной моделью набора является модель гуманоидного робота, представленная тремя типами кинематики робота (тип А, тип В и тип С, соответственно).
 |
 |
По умолчанию, в контроллер CM-530 установлена управляющая программа под гуманоидного робота типа А. Распознать, под какой тип робота (А, В или С) записана в контроллер управляющая программа, можно по специальному музыкальному сигналу, проигрываемому при запуске программы робота (см. картинку выше).
Демонстрационные программы для трех типов модели гуманоидного робота:
| Тип А: Управляющая программа (Task Code) — Скачать Файл сложных движений (Motion File) — Скачать |
Тип В: Управляющая программа (Task Code) — Скачать Файл сложных движений (Motion File) — Скачать |
| Тип С: Управляющая программа (Task Code) — Скачать Файл сложных движений (Motion File) — Скачать |
Инструкция по сборке гуманоидного робота Скачать |
| Комбинации кнопок пульта дистанционного управления: 1) Подпрограмма робота-бойца (для гуманоидного робота типа А) Управляющая программа робота-бойца (Task Code); Файл сложных движений робота-бойца (Motion File) Комбинации шагающих движений робота-бойца: |
| U L U+L L+5 L+U+5 R+5 R+U+5 |
Движение вперед Поворот налево Движение вперед и поворот налево Движение влево Выпад вперед и влево Движение вправо Выпад вперед и вправо |
D R U+R L+5+6 L+D+5 R+5+6 R+D+5 |
Движение назад Поворот направо Движение вперед и поворот направо Быстрое движение влево Выпад назад и влево Быстрое движение вправо Выпад назад и вправо |
| Комбинации атакующих движений робота-бойца: |
| 1+L 1+R 2+U 2+L 2+R 3 |
Диагональная атака влево Диагональная атака вправо Атака вперед Атака слева Атака справа Атака слева и справа |
6+2 6+4 6+1 4+U (4+L) 4+D (4+R) — |
Сильная атака слева Сильная атака справа Сильная атака вперед Захват №1 Захват №2 — |
| Прочие движения робота-бойца: |
| 5+6+D+3 1+U |
Torque Off Подъем на ноги при падении на грудь |
6+2 6+4 |
Torque On Подъем на ноги при падении на спину |
| 2) Подпрограмма робота-футболиста (для гуманоидного робота типа А) Управляющая программа робота-футболиста (Task Code); Файл сложных движений робота-футболиста (Motion File) Комбинации шагающих движений робота-футболиста: |
| U L U+L L+5 L+U+5 R+5 R+U+5 |
Движение вперед Поворот налево Движение вперед и поворот налево Движение влево Выпад вперед и влево Движение вправо Выпад вперед и вправо |
D R U+R L+5+6 L+D+5 R+5+6 R+D+5 |
Движение назад Поворот направо Движение вперед и поворот направо Быстрое движение влево Выпад назад и влево Быстрое движение вправо Выпад назад и вправо |
| Комбинации атакующих движений робота-футболиста: |
| 2+U 2+6+U 2+D 2+L 2+R |
Левый удар вперед Сильный левый удар вперед Удар назад Удар слева Удар справа |
4+U 4+6+U 4+D 4+L 4+R |
Правый удар вперед Сильный правый удар вперед Удар назад Удар слева Удар справа |
| Комбинации защитных движений робота-футболиста: |
| 3 3+U |
Подготовительная стойка (при блоке) Передний блок |
3+L 3+R |
Блок слева Блок справа |
| Прочие движения робота-футболиста: |
| 5+6+D+3 1+U 1+L |
Torque Off Подъем после падения лицом вперед Удары руками в грудь |
5+6+U+1 1+D 1+R |
Torque On Подъем после падения на спину Приветствие |
Начальный уровень
1. Crossing Gate |
Скачать Инструкцию по сборке Скачать Управляющую программу Посмотреть видеодемонстрацию Устройства: CM-530(x1), AX-12A(x1) Настройки DYNAMIXEL: AX-12A ID[1]: режим шарнира Синтаксис языка RoboPlus: Function, Call, Load, Endless Loop, If, Wait While Алгоритм: Управляйте позицией сервопривода, используя кнопки на контроллере CM-530. Руководство по эксплуатации: Нажмите кнопку «U» для подъема шлагбаума и кнопку «D» для его опускания. |
2. Universal Gauge |
Скачать Инструкцию по сборке Скачать Управляющую программу Посмотреть видеодемонстрацию Устройства: CM-530(x1), AX-12A(x1) Настройки DYNAMIXEL: AX-12+ ID[1]: режим шарнира Синтаксис языка RoboPlus: Function, Call, Return, Load, Calculate, Endless Loop, If, Else if Алгоритм: Управляйте скоростью сервопривода, используя кнопки на контроллере CM-530. Руководство по эксплуатации: Нажмите кнопку «U» для увеличения скорости движения сервопривода и кнопку «D» для ее уменьшения. |
3. Crocodile Mouth |
Скачать Инструкцию по сборке Скачать Управляющую программу Посмотреть видеодемонстрацию Устройства: CM-530(x1), AX-12+(x1), IR Sensor(x1) Настройки DYNAMIXEL: AX-12+ ID[1]: режим шарнира Синтаксис языка RoboPlus: Function, Call, Load, Endless Loop, If, Else If, Wait While Алгоритм: Управляйте положением сервопривода и зуммером, используя значения от ИК-датчика и Таймера. Руководство по эксплуатации: Рот робота-крокодила открывается при обнаружении передним датчиком объекта, и закрывается при его отсутствии. В случае отсутствия объекта перед роботом в течение 10 секунд, запустится мелодия. |
4. Pan Tilt |
Скачать Инструкцию по сборке Скачать Управляющую программу Посмотреть видеодемонстрацию Устройства: CM-530(x1), AX-12+(x2) Настройки DYNAMIXEL: AX-12+ ID[1, 2]: режим шарнира Синтаксис языка RoboPlus: Function, Call, Load, Calculate, Endless Loop, If, Else If, Wait While Алгоритм: Управляйте следящей платформой при помощи кнопок контроллера СМ-530. Руководство по эксплуатации: Нажмите кнопку «U» на контроллере CM-530 для движения следящей платформы вверх. Нажмите кнопку «D» для движения следящей платформы вниз. Кнопка «R» приведет следящую платформу в движение вправо. А кнопка «L» на контроллере приведет платформу в движение влево. |
5. Parking Gate |
Скачать Инструкцию по сборке Скачать Управляющую программу Посмотреть видеодемонстрацию Устройства: CM-530(x1), AX-12+(x2), IR Sensor(x1) Настройки DYNAMIXEL: AX-12+ ID[1, 2]: режим шарнира Синтаксис языка RoboPlus: Function, Call, Load, Endless Loop, If, Else If, Wait While, Break Loop Алгоритм: Управляйте положением сервопривода, используя ИК-датчик и значение нагрузки сервопривода DYNAMIXEL. Руководство по эксплуатации: В случае обнаружения объекта перед шлагбаумом, шлагбаум открывается вверх. Если объект находится перед шлагбаумом и оказывает на него давление, шлагбаум открывается горизонтально вбок. Если объект перед шлагбаумом не обнаружен, он остается закрытым. |
6. Smart Car |
Скачать Инструкцию по сборке Скачать Управляющую программу Посмотреть видеодемонстрацию Устройства: CM-530(x1), AX-12+(x4), IR sensor(x2) Настройки DYNAMIXEL: AX-12+ ID[1 ~ 4]: режим колеса Синтаксис языка RoboPlus: Function, Call, Load, Calculate, Jump, Lable, Endless Loop, If, Else If, Wait While Алгоритм: Выберите режим управления роботом при помощи кнопок контроллера CM-530: ручное управление с кнопок контроллера или автономное управление по данным с датчиков. Руководство по эксплуатации: Для выбора ручного режима управления с кнопок контроллера, нажмите одновременно кнопки «U» и «START». При нажатии на кнопку «L» робот будет двигаться вперед, на кнопку «R» — назад, кнопка «U» приведет робота в движение направо, а кнопка «D» — налево. Для выбора автономного режима управления по данным с датчиков, нажмите одновременно кнопки «D» и «START». Робот будет двигаться вперед, пока не встретит на своем пути препятствие передним датчиком или край стола нижним датчиком. В случае обнаружения препятствия, робот немного отъедет назад и повернет направо. |
7. Clapping Crab |
Скачать Инструкцию по сборке Скачать Управляющую программу Посмотреть видеодемонстрацию Устройства: CM-530(x1), AX-12+(x2) Настройки DYNAMIXEL: AX-12+ ID[1, 2]: режим шарнира Синтаксис языка RoboPlus: Load, Calculate, Endless Loop, If, Wait While Алгоритм: Управление положением сервопривода при помощи количества определенных микрофоном контроллера звуков. Руководство по эксплуатации: Робот займет базовое положение с открытым захватом клешней. При определении звука (хлопков), робот закроет и вновь откроет своей захват ровно столько же раз, сколько звуков (хлопков) будет определено контроллером робота. |
8. Attacking Duck |
Скачать Инструкцию по сборке Скачать Управляющую программу Посмотреть видеодемонстрацию Устройства: CM-530(x1), AX-12+(x3), IR Sensor(x2) Настройки DYNAMIXEL: AX-12+ ID[1, 2, 3]: режим шарнира Синтаксис языка RoboPlus: Function, Call, Load, Endless Loop, If, Loop While, Wait While Алгоритм: Изменение положения сервоприводов робота при изменении показаний инфракрасного датчика. Руководство по эксплуатации: Робот непрерывно поворачивается вокруг своей оси, пока инфракрасные датчики, расположенные на роботе, не определят объект перед ними. При определении одним из датчиков (например, левым) препятствия, робот начнет поворачиваться в сторону расположения этого датчика (влево). Если оба датчика робота одновременно определят объект перед собой, робот «атакует» объект. |
9. Distance Level Meter |
Скачать Инструкцию по сборке Скачать Управляющую программу Посмотреть видеодемонстрацию Устройства: CM-530(x1), AX-12+(x1), DMS Sensor(x1) Настройки DYNAMIXEL: AX-12+ ID[1]: Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Calculate, Endless Loop Алгоритм: Управляйте положением DYNAMIXEL, используя расстояние, определяемое датчиком. Руководство по эксплуатации: Полоска перемещается в зависимости от расстояния, определяемого датчиком. |
10. Line Tracer |
Скачать Инструкцию по сборке Скачать Управляющую программу Посмотреть видеодемонстрацию Устройства: CM-530(x1), AX-12+(x2), IR Sensor(x2) Настройки DYNAMIXEL: AX-12+ ID[1, 2]: Wheel Mode Синтаксис языка RoboPlus: Function, Call, Load, Calculate, Endless Loop, If, Else If, Else, Wait While Алгоритм: Управляйте трассировщиком линии, используя значение обнаруженное датчиком. Руководство по эксплуатации: Робот отслеживает черную линию. |
11. Walking Droid |
Скачать Инструкцию по сборке Скачать Управляющую программу Скачать Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(x1), AX-12+(x4), IR Sensor(x1) Настройки DYNAMIXEL: AX-12+ ID[1 ~ 4]: Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Endless Loop, If, Loop While, Wait While Алгоритм: Управляйте различными движениями, используя значение ИК-датчика. Руководство по эксплуатации: Поместите объект на пути, по которому пойдёт робот, а затем запустите робота. Проверьте, избегает ли робот препятствий при ходьбе. |
Средний уровень
12. Probing Robot |
Скачать Инструкцию по сборке Скачать Управляющую программу Посмотреть видеодемонстрацию Устройства: CM-530(1), AX-12+(7),IR Sensor(1), DMS Sensor(1) Настройки DYNAMIXEL: AX-12+ ID[1~4] : режим шарнира, AX-12+ ID[5~7] : совместный режим Синтаксис языка RoboPlus: Function, Call, Return, Load, Calculate, Endless Loop, If, Else, Wait While, Break Loop Алгоритм: Зондирование и обработка объекта в зависимости от значения ИК-датчика и датчика DMS Руководство по эксплуатации: Поместите объекты различных размеров на пути к роботу, а затем включите его. Если препятствие слишком большого размера, он будет избегать его. Если препятствие небольшого размера, тогда робот сдвинет его, а затем продолжит идти своим путем. |
13. Excavator |
Скачать Инструкцию по сборке Скачать Управляющую программу Скачать Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(1), AX-12+(8), IR Sensor(1), DMS Sensor(1) Настройки DYNAMIXEL: AX-12+ ID[1~4] : Wheel Mode, AX-12+ ID[5~8] : Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Calculate, Endless Loop, If, Else, Wait While Алгоритм: DYNAMIXEL Position control depending on IR Sensor’s and DMS Sensor’s value. Руководство по эксплуатации: Поместите объекты различных размеров на пути к роботу, а затем включите его. Когда объект обнаружен, робот начинает раскопки. Если при переноске объекта будет обнаружен новый объект, робот повернется в этом направлении и опустит первый объект, который он нес. |
14. Robot Flower |
Скачать Инструкцию по сборке Скачать Управляющую программу Скачать Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(1)(Sound Detection), AX-12+(6) Настройки DYNAMIXEL: AX-12+ ID[1~6] : Joint Mode Синтаксис языка RoboPlus: Function, Call, Load,Endless Loop, If, Else, Wait While Алгоритм: Управляйте различными движениями, используя значение ИК-датчика. Руководство по эксплуатации: Когда робот включен, лепестки распускаются и движутся, будто танцуют. От хлопка лепестки медленно закрываются. От нескольких хлопков лепестки закрываются быстрее. |
15. Fawn |
Скачать Инструкцию по сборке Скачать Управляющую программу Скачать Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(1)(Sound Detection), AX-12+(7), IR Sensor(1) Настройки DYNAMIXEL: AX-12+ ID[1~7] : Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Endless Loop, If, Else If, Else, Wait While Алгоритм: Обнаружение объекта с использованием значения ИК-датчика. Руководство по эксплуатации: Когда ничего не обнаружено рядом с олененком , он садится и оглядывается. Если объект обнаружен перед ним, олененок будет следовать за объектом. |
16. Turtle |
Скачать Инструкцию по сборке Скачать Управляющую программу Скачать Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(1), AX-12+(8), IR Sensor(2), DMS Sensor(1) Настройки DYNAMIXEL: AX-12+ ID[1~8] : Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Endless Loop, If, Else If, Else, Wait While Алгоритм: избегает препятствий в зависимости от значения ИК-датчика и датчика DMS. Руководство по эксплуатации: Поместите препятствие на пути робота и включите его. Черепаха избегает препятствий перед собой. |
17. GerWalk |
Скачать Инструкцию по сборке Скачать Управляющую программу Скачать Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(1), AX-12+(7), IR Sensor(2), DMS Sensor(1) Настройки DYNAMIXEL: AX-12+ ID[1~7] : Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Endless Loop, If, Else If, Else, Loop While Алгоритм: Контролируйте ходьбу робота с помощью ИК-датчика и значения датчика DMS. Руководство по эксплуатации: Поставьте препятствие на пути робота и включите его. Робот избегает препятствий перед собой и по бокам. |
18. Battle Droid |
Скачать Инструкцию по сборке Скачать Управляющую программу Скачать Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(1), AX-12+(8), IR Sensor(1) Настройки DYNAMIXEL: AX-12+ ID[1~8] : Joint Mode Синтаксис языка RoboPlus: Variables, Function, Call, Load, Calculate, Endless Loop, If, Else If, Else, Wait While Алгоритм: Управление DYNAMIXEL с помощью значения ИК-датчика Руководство по эксплуатации: Поставьте препятствие на пути робота и включите его. Когда робот обнаруживает объект, он атакует его обеими руками. Если боевой дроид упадет, он будет знать, с какой стороны упал, и встанет сам. |
19. Quadruped Robot |
Скачать Инструкцию по сборке Скачать Управляющую программу Скачать Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(1), AX-12+(8), IR Sensor(1), DMS Sensor(1) Настройки DYNAMIXEL: AX-12+ ID[1~8] : Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Endless Loop, If, Wait While Алгоритм: Контролируйте ходьбу с помощью ИК-датчика и значения датчика DMS Руководство по эксплуатации: Поставьте препятствие на пути робота и включите его. Робот избегает препятствий перед ним. |
20. Biped Walking Robot |
Скачать Инструкцию по сборке Скачать Управляющую программу Скачать Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(1), AX-12+(8), IR Sensor(1), DMS Sensor(1) Настройки DYNAMIXEL: AX-12+ ID[11~18] : Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Endless Loop, If, Else If, Else, Wait While, Loop While Алгоритм: Контролируйте ходьбу с помощью ИК-датчика и значения датчика DMS Руководство по эксплуатации: Поставьте препятствие на пути робота и включите его. Робот избегает препятствий перед собой и по бокам. |
21. Robot Arm |
Скачать Инструкцию по сборке Скачать Управляющую программу Посмотреть видеодемонстрацию Устройства:CM-530(1), AX-12+(8) Настройки DYNAMIXEL: AX-12+ ID[1~8] : Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Calculate, Endless Loop, If, Else, Loop While Алгоритм: Связь DYNAMIXEL для значения позиции Руководство по эксплуатации: Проверьте, реагирует ли двигатель на движение управляющего двигателя. |
Продвинутый уровень
22. Dinosaur |
Скачать Инструкцию по сборке Скачать Управляющую программу Download Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(1), AX-12+(15), IR Sensor(1) Настройки DYNAMIXEL: AX-12+ ID[1~15] : Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Lable, Jump, If, Else If, Else, Wait While Алгоритм: Обнаружение объектов и управление движением с помощью значения ИК-датчика. Руководство по эксплуатации: Поместите препятствие на пути робота и включите его. Робот-динозавр атакует. Когда препятствие исчезает, он продолжает идти. Если в течение некоторого времени робот ничего не обнаруживает, он засыпает. |
23. Puppy |
Скачать Инструкцию по сборке Скачать Управляющую программу Скачать Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(1)(Sound Detection, Timer), AX-12+(17), IR Sensor(1) Настройки DYNAMIXEL: AX-12+ ID[1~17] : Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Lable, Jump, If, Else If, Wait While Алгоритм: Управление движением в зависимости от обнаружения звука ИК-датчиком и таймером. Руководство по эксплуатации: Поместите препятствие на пути робота и включите его. Если робот обнаружит звук, он начнет идти, избегая препятствий. Если вы дотронетесь до рта робота, он будет двигаться. Робот выполняет различные команды в зависимости от количества хлопков. Если в течение некоторого времени робот ничего не обнаруживает, он засыпает. |
24. King Spider |
Скачать Инструкцию по сборке Скачать Управляющую программу Скачать Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(1)(Timer), AX-12+(18), IR Sensor(2) Настройки DYNAMIXEL: AX-12+ ID[1~18] : Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Lable, Jump, If, Wait While Алгоритм: Управление движением приложений в зависимости от обнаружения звука ИК-датчиком и таймером. Руководство по эксплуатации: Если робот обнаружит объект во время ходьбы, он обойдёт препятствие. Робот атакует, если видит какой-либо объект перед собой. Если объект обнаруживается над ним, робот сжимается. Если в течение некоторого времени робот ничего не обнаруживает, он засыпает. |
25. Scorpion |
Скачать Инструкцию по сборке Скачать Управляющую программу Скачать Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(1)(Sound detection), AX-12+(18), DMS Sensor(1) Настройки DYNAMIXEL: AX-12+ ID[1~18] : Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Lable, Jump, If, Else If, Loop For, Wait While Алгоритм: Управление движением приложения в зависимости от количества обнаруженных звуков и значения датчика DMS. Руководство по эксплуатации: Робот спит, когда вы впервые включаете его. Робот проснется, если вы хлопнете. Если вы хлопнете дважды, когда робот проснется, он убежит. Чем ближе ваша рука к сенсору, тем выше будет подниматься хвост, угрожая вам. Если вы подойдете слишком близко, он нападет. |
26. Lizard |
Скачать Инструкцию по сборке Скачать Управляющую программу Скачать Файл движения Посмотреть видеодемонстрацию Устройства: CM-530(1), AX-12+(14), IR Sensor(1),DMS Sensor(1) Настройки DYNAMIXEL: AX-12+ ID[1~14] : Joint Mode Синтаксис языка RoboPlus: Function, Call, Load, Calculate, Endless Loop, If, Else If, Else, Wait While Алгоритм: Управление движением при уклонении от препятствий с использованием значения ИК-датчика и датчика DMS. Руководство по эксплуатации: После включения он будет сканировать окружающее пространство и остановится, если обнаружит объект, а затем его обойдёт. Если хвост робота будет пойман, он попытается сбежать. |