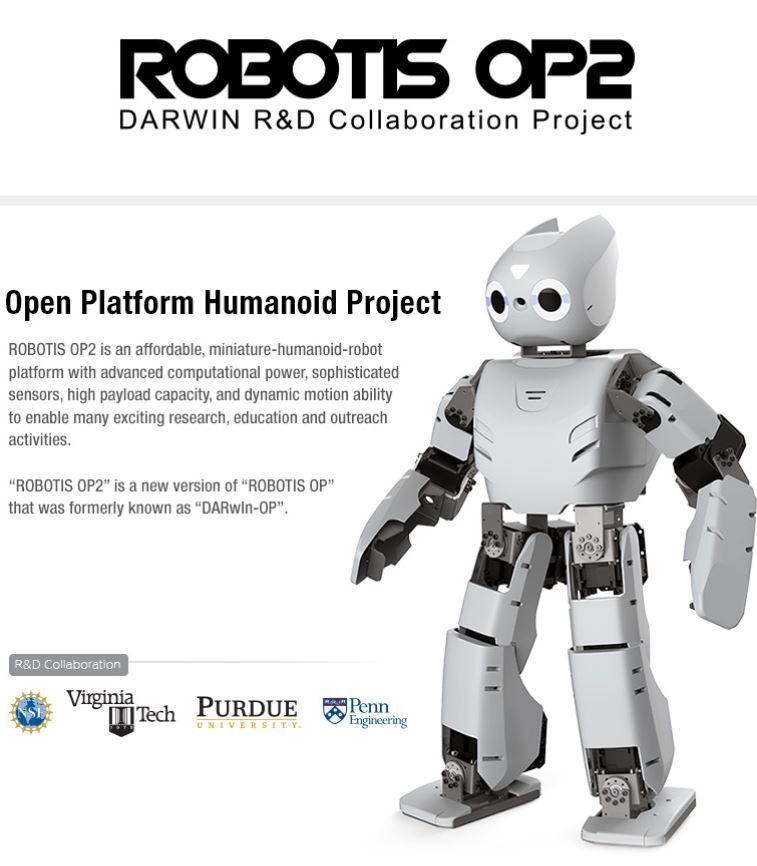
DARwIn-OP2 в переводе дословно расшифровывается как Динамический Антропоморфный Робот, обладающий Интеллектом, реализованный на Открытой Платформе.
DARwIn-OP2 — это компактный человекоподобный робот, представляющий собой уникальную робототехническую платформу, предназначенную для научных исследований, разработок в рамках образовательного процесса, который бесспорно так же может применяться для всевозможных развлечений, например — проведения соревнований среди аналогичных моделей или с образовательными робототехническими конструкторами Bioloid.
DARwIn-OP обладает высокой производительностью и мощными вычислительными способностями, разнообразным набором сенсорных устройств и высокими динамическими характеристиками.
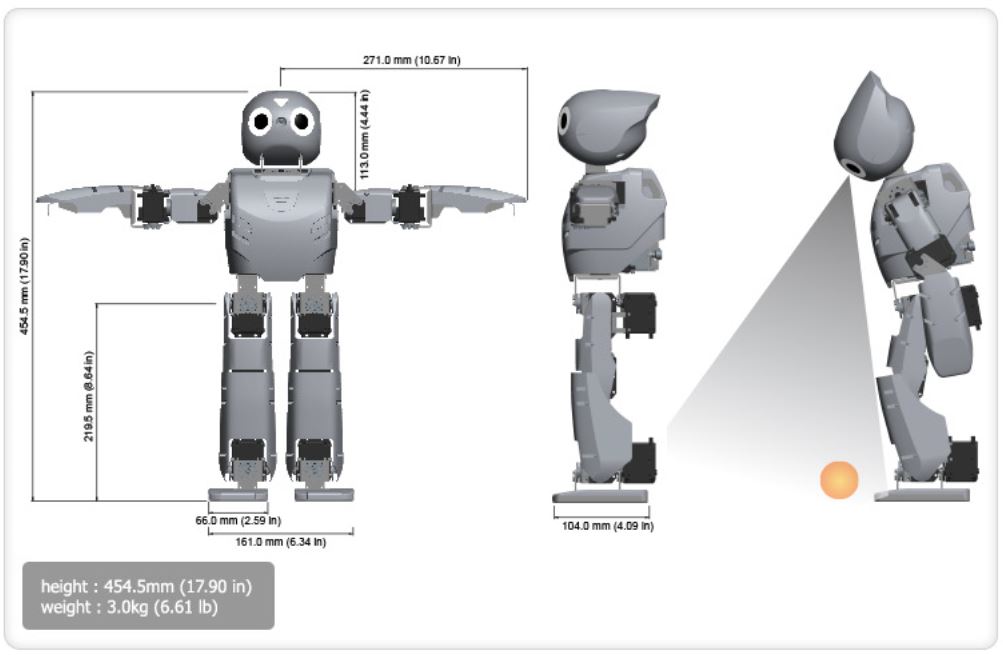
- Рост, мм: 454.5
- Вес, кг: 3
- Скорость ходьбы, см/сек: 24
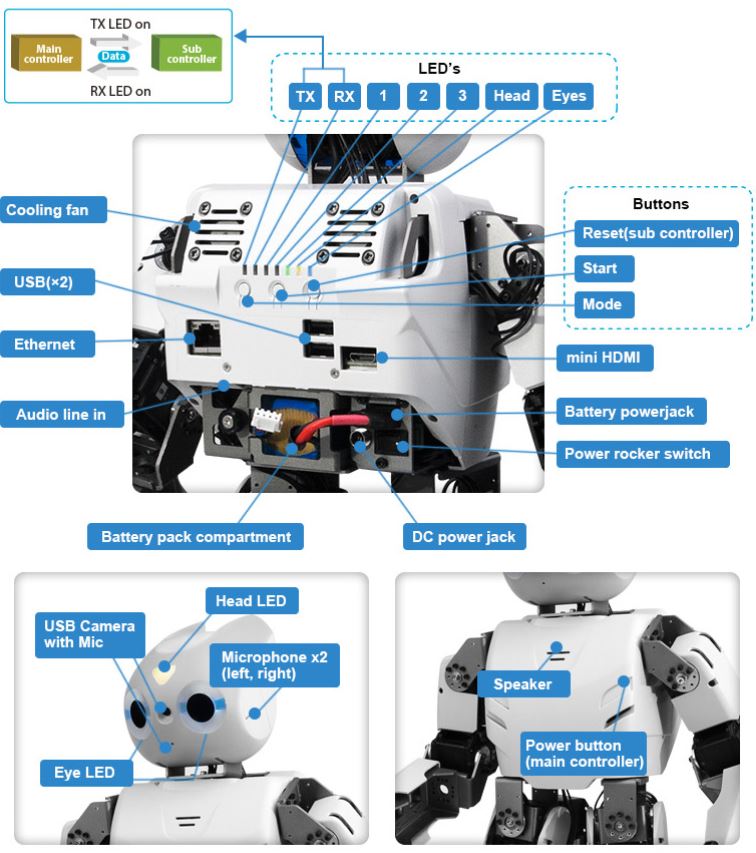
- Зрение: Камера 1шт.
- Слух: Микрофон 2шт.
- Движение и ориентация: 3х-осный гироскоп 1шт. и акселерометр 1шт.
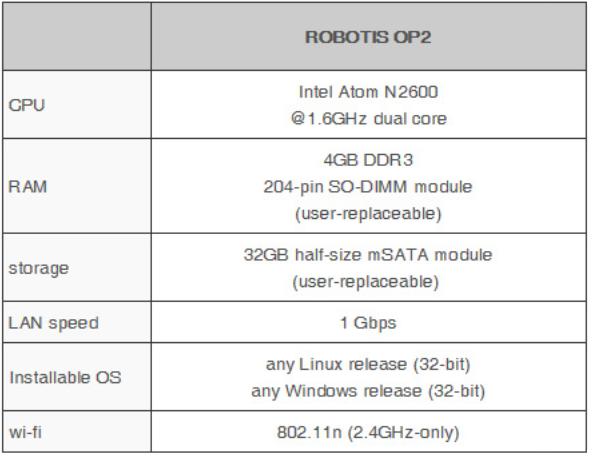
- Процессор: Intel Atom N2600 at 1,6Ghz, 4GB flash SSD memory 1шт.
- Контроллер: Controller CM-740 with ARM Cortex M3 at 72Mhz 1шт.
- Трехосный гироскоп: 1шт.
- Трехосный акселерометр: 1шт.
- Dynamixel MX-28 (Сервопривод): 20шт.
- и многое другое…
Открытая платформа на основе ПК с удобными интерфейсами
Высокая производительность и улучшенные возможности
- Скорость ходьбы: 24.0 см/сек 0.25 сек/шаг, возможность модификации походки
- Скорость подъема из положения лежа: 2.8 сек (лицом вниз) and 3.9 сек (лицом вверх), возможность модификации подъема
- Встроенный ПК: 1.6 GHz Intel Atom Z530 on-board 4GB flash SSD
- Управляющей контроллер CM-730: ARM CortexM3 STM32F103RE 72MHz
- 20 сервомашинок обеспечивающих 6-ть степеней свободы для каждой ноги, 3-и степени в руке и 2-е в шее.
- Серводвигатели Dynamixel MX-28 с металлическими износостойкими редукторами
- Руководство пользователя
- Режим энергосбережения для экономии батареи
- 3Mbps высокоскоростная шина данных для управления сервоприводами Dynamixel
- Аккумулятор обеспечивает 30 мин. непрерывного движения, зарядное устройство, внешний блок питания. Смена аккумуляторов возможна без выключения системы
- Подключение различных периферийных устройств
- Трехосный гироскоп, Трехосный акселерометр, Кнопки x3, Микрофон x2
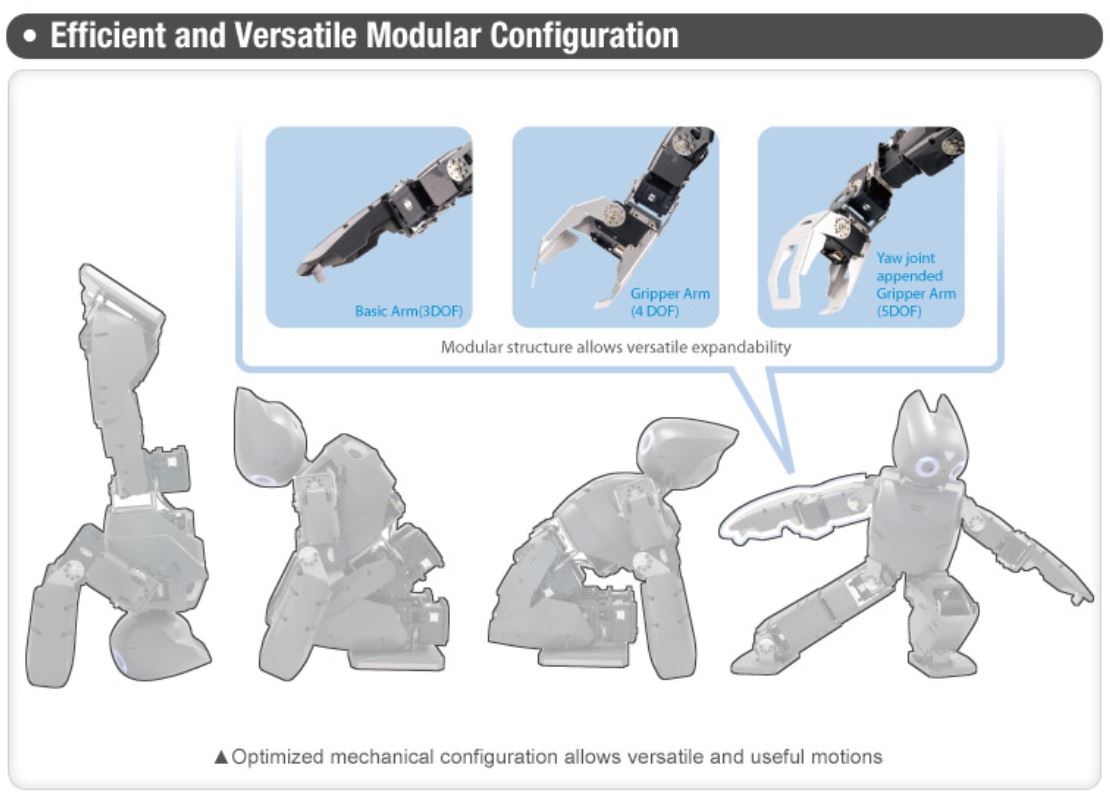
Эффективная и разнообразная модульная конфигурация
Простая и понятная архитектура

Открытая аппаратная и программная платформа
Вся информация, спецификации и программное обеспечение к DARwIn-OP находятся в открытом доступе.
- Онлайн документация
- Репозиторий открытого ПО
- Описание механики: Разъемы, Кинематика, Динамика, CAD чертежи
- Описание электроники: Контроллеры, Элекрические схемы, Спецификации
- Описание программного обеспечения: Среда разработки, Библиотека алгоритмов, Примеры программ
- Руководство пользователя
- Открытое сообщество пользователей: Обмен информацией, Помощь в решении проблем
Масса и габаритные размеры